This is the third of four articles that dwell into the very basics of the functioning and aerodynamics of a helicopter. We’ll get into the fun stuff soon.
So, we already know about helicopter controls and what happens when we use them. We already heard about torque, which is something that we’ll talk about in this article. There are a few more things that you need to know about the interaction between the controls and their effect and what you need to do to counter them (usually with other controls).
Collective, rotor and tail-rotor
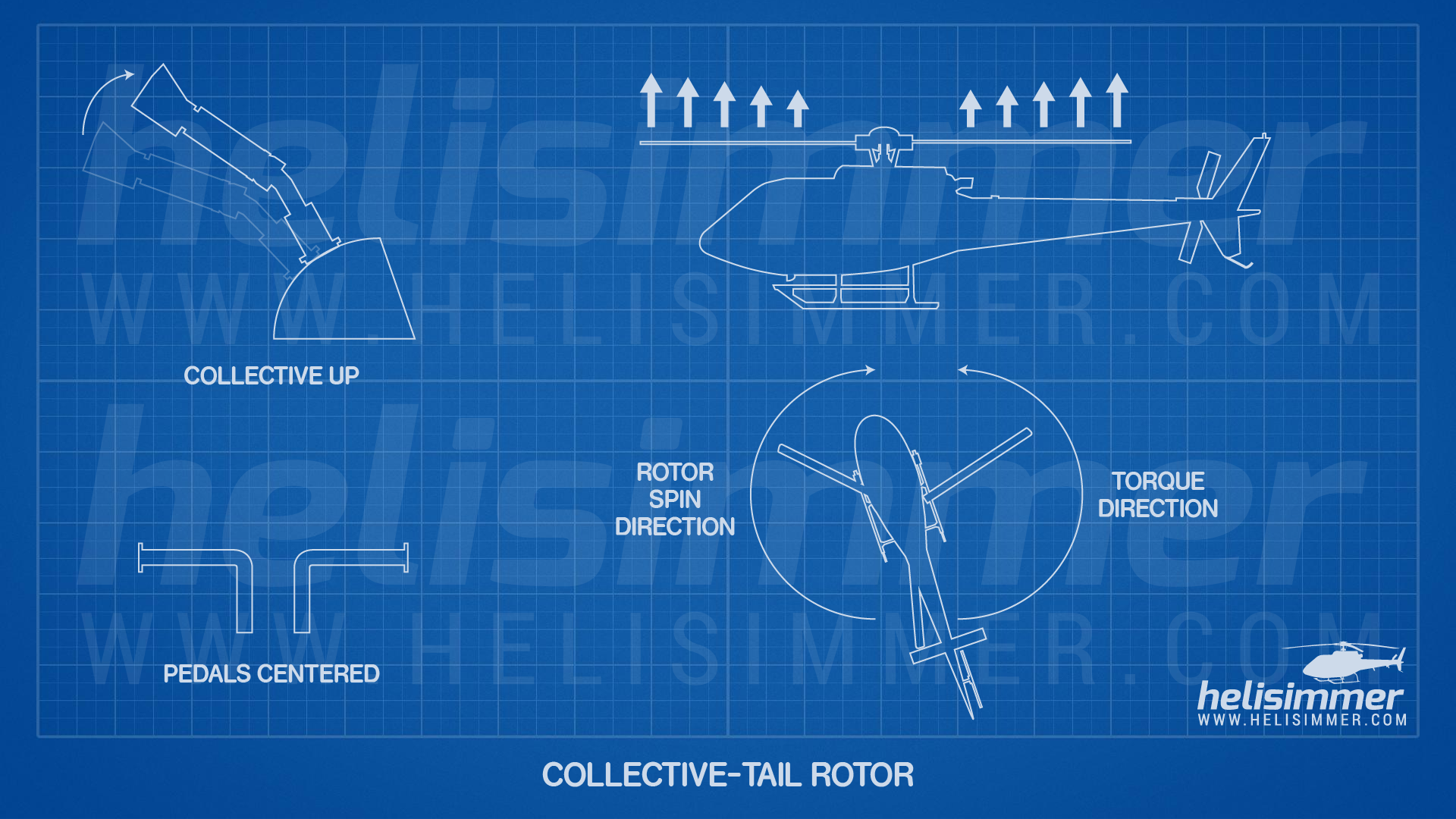
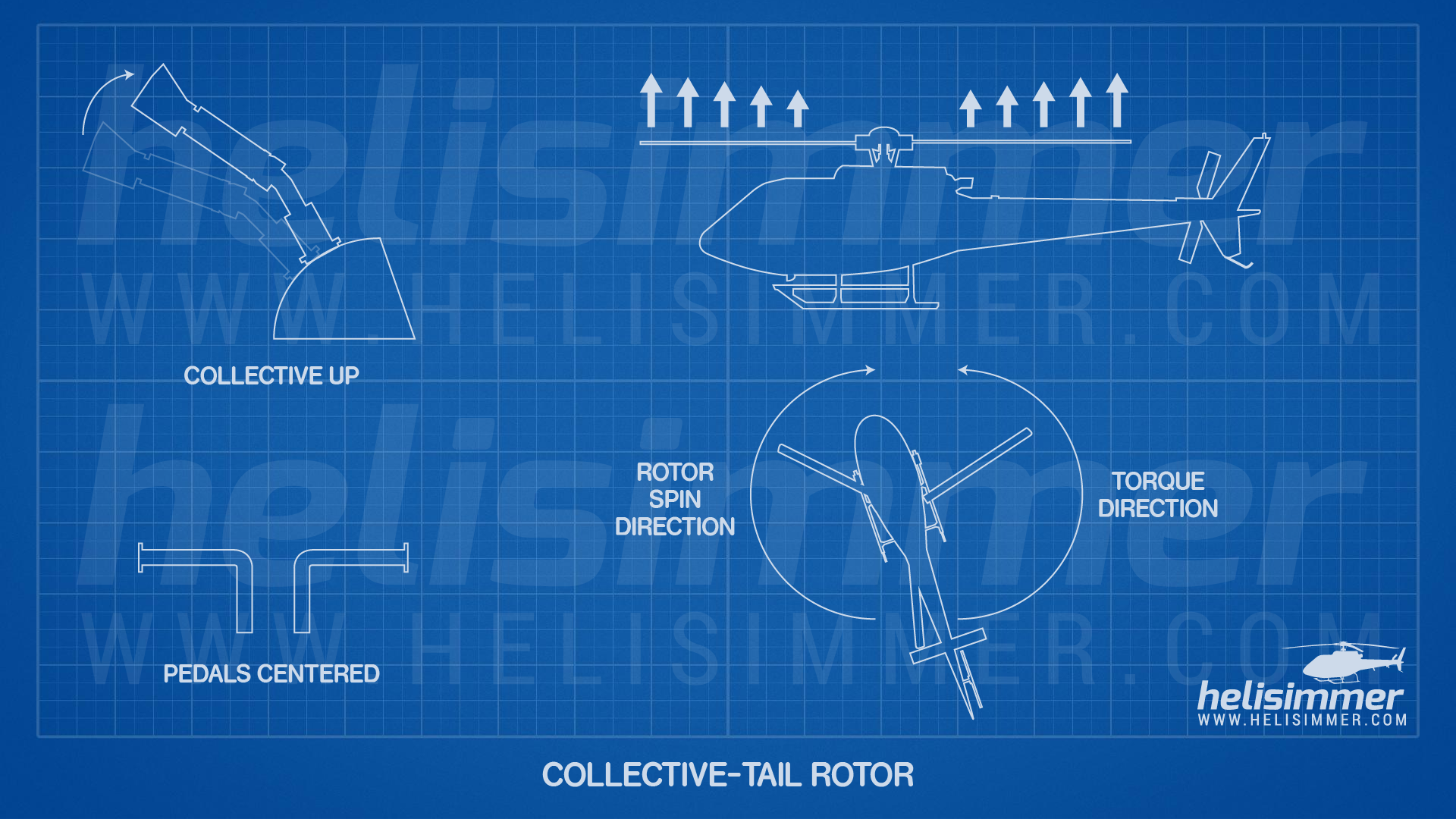
Like you read on the previous article, lifting the collective will increase lift in an equal way around the rotor so that the helicopter may rise. This increased lift also comes with increased drag so our engine must increase its RPM as well, which means there will be more torque. We will need to counter-act this torque with our anti-torque pedals.
On the Bell 206, the rotor spins in an anti-clockwise direction (if you look at the helicopter from the top-down).
Per Newton’s third law: “To every action there is always opposed an equal reaction”. This means that, with increased torque, the fuselage of the B206 will try to spin clockwise (the nose will want to move right).
So, when we move the collective up, we will need to compensate the increased torque by applying the correspondent pedal (which may vary from helicopter to helicopter).
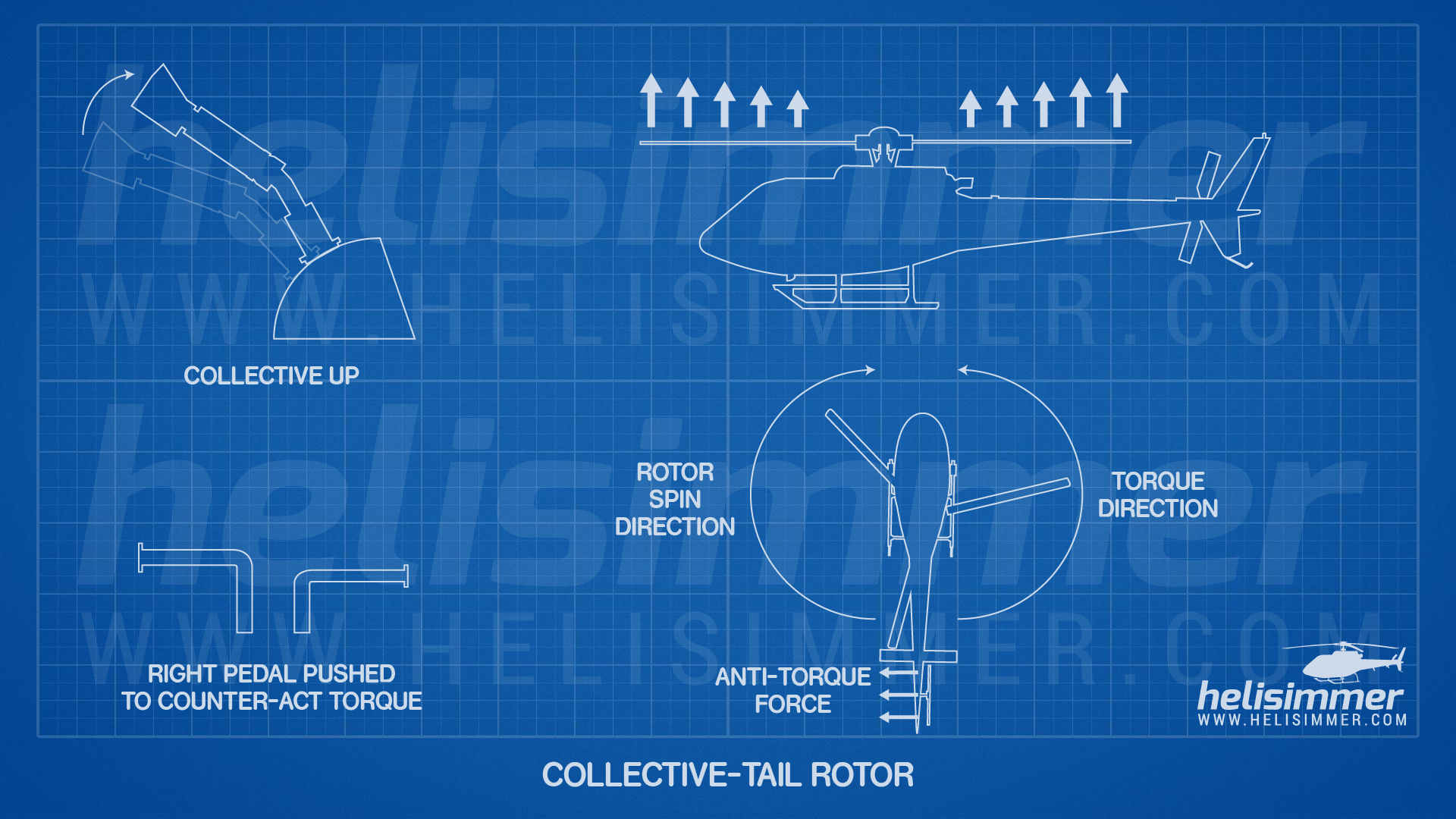
When we move the collective down, we’ll then need to reduce this compensation by pushing the other pedal. On the Bell 206, that would be the right pedal. This may happen up to a point where the pedals stay neutral.
Tail rotor and cyclic
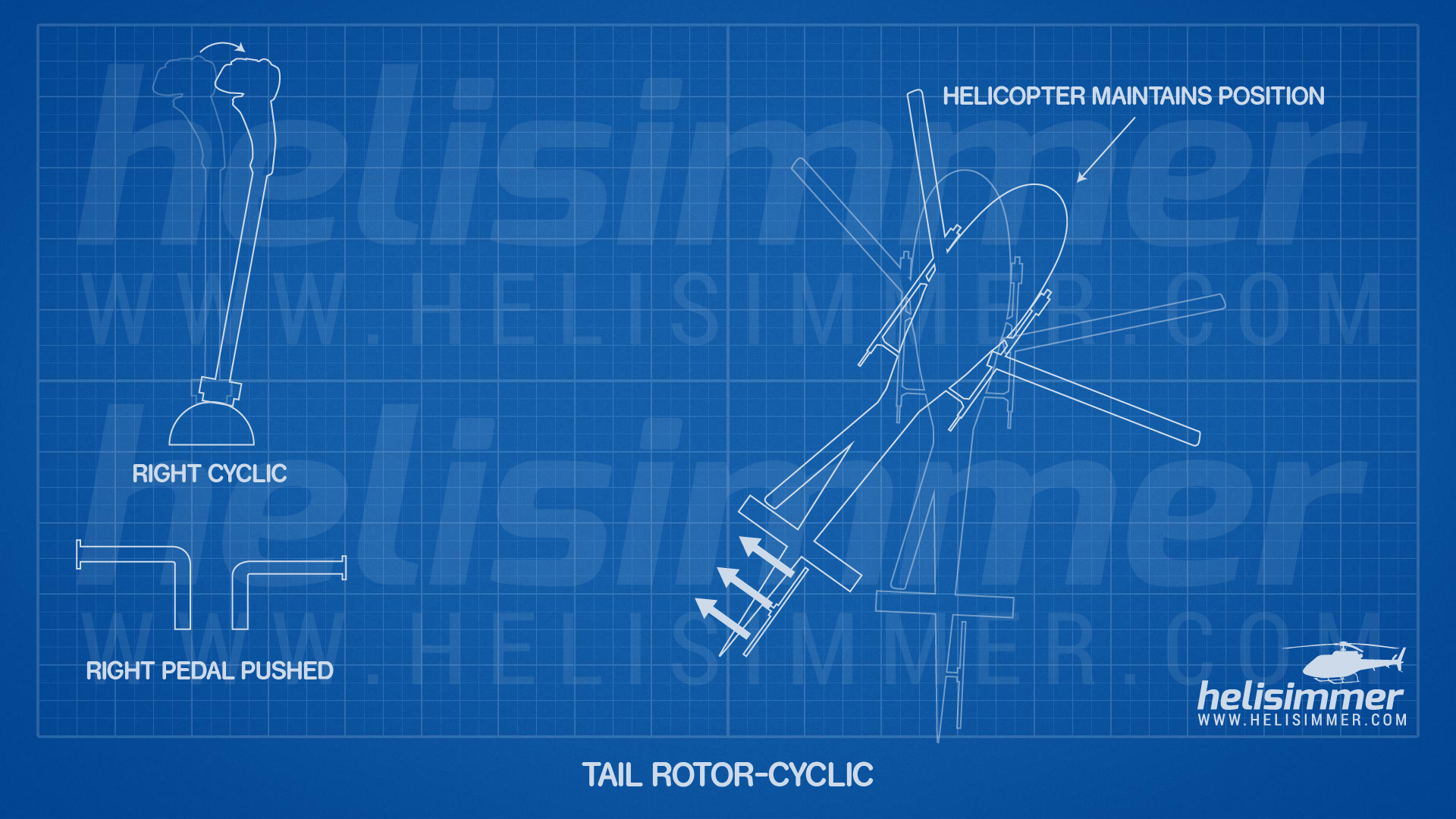
When we push the anti-torque pedals, a force makes the fuselage spin. As we’ve seen, this may be very handy to counter-act torque but also to move the helicopter on the yaw axis for maneuvering.
Spinning the fuselage is not the only thing the tail-rotor will do. There will be a slight sideways force. If you push the left pedal, there will be a force applied to the tail boom so that the nose spins left.
This force will also push the whole fuselage a bit to the right, making the helicopter move slightly sideways. It’s not something that will project you sideways in a fast manner, but this force exists and you will be pushed.

What is it that we do if we want to move sideways? Or if we want to counter-act a force that’s pushing is sideways? That’s right: we use the cyclic to keep the helicopter in the position we want.
This phenomenon, called translating tendency, is more noticeable when you are hovering (with no speed or close to no speed) and close to other objects. You may notice you are drifting in one direction and you may or may not need to correct this. It will depend on what is it that you are doing and the overall conditions on the spot.
In all honesty, this is something that I don’t worry about too much, but you should be careful as not to miss your landing spot or crash into something.
Cyclic and collective

Finally, and as important as the collective/tail-rotor interaction, we will talk about the cyclic and the collective.
When we want to move in any of the horizontal directions (forward, backward, left or right), we’ll move the cyclic accordingly.
Doing so, will shift the force of the rotor disk towards a certain direction. Geometry comes to our aid (or peril) and we can see that when we tilt a vertical vector (which, in our case, represents lift), the relative, vertical height, decreases.
This is what happens to our vertical lift as we move the cyclic: we gain momentum in a given direction, but we lose lift (and, with it, very probably, altitude as well).
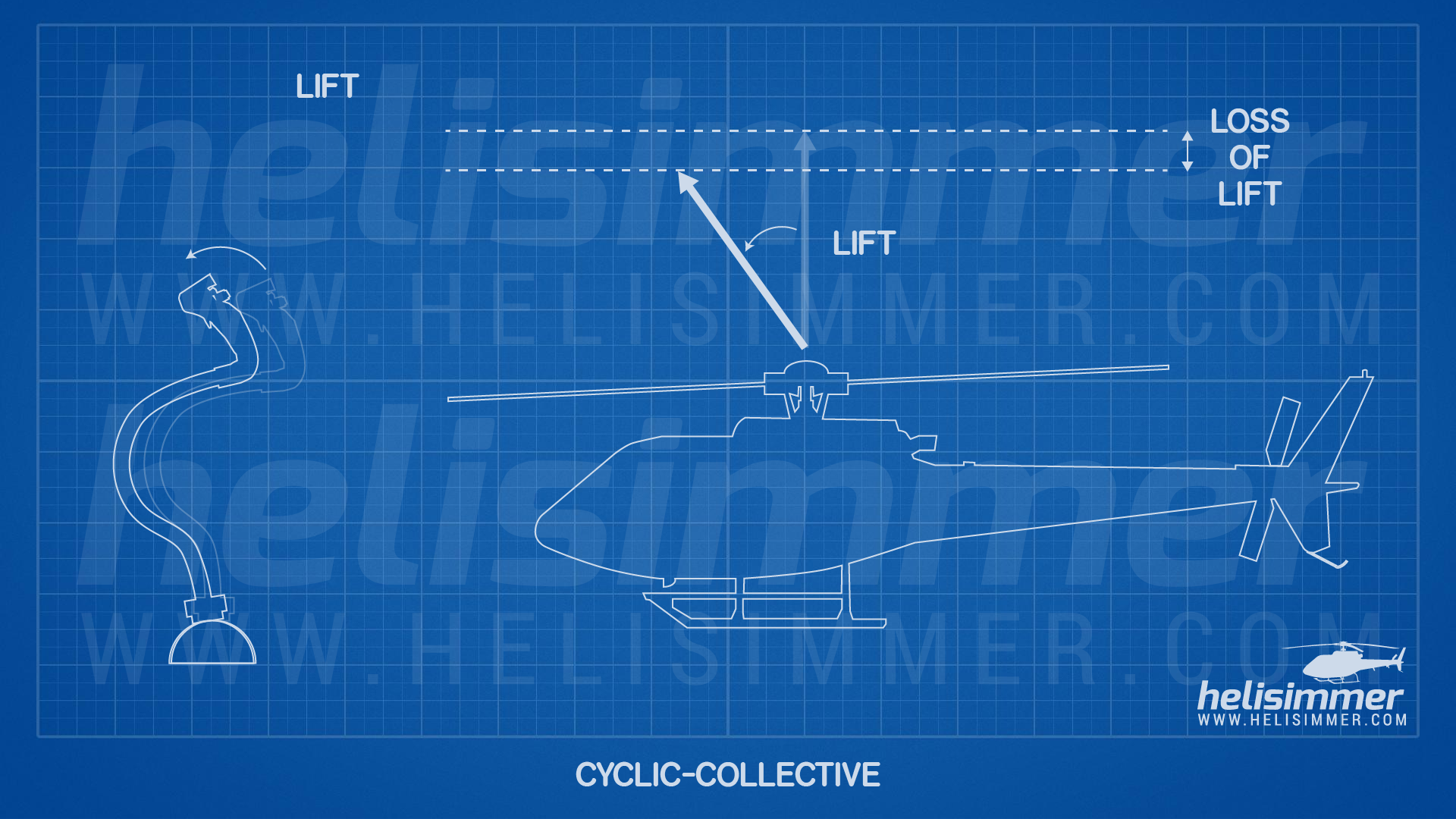
What do we do, then? If we want to keep our altitude (or our attitude – ascending or descending) we will need to increase collective.
Remember what happens when we increase collective? That’s right: increased torque which we will probably need to address and correct.
And off we go again.
Conclusion
Flying a helicopter has often been described as a “dance” or the control over precarious forces that you need to keep in constant balance.
Don’t let this push you away from helicopters, though. It’s part of what makes them so much fun, along with the fact that you can do a lot of stuff that other aircraft can’t do.
You’ll learn a lot of cool stuff that can be applied to your fixed wing flying as well, like precision control, better planning, being more careful with your aircraft, etc.
So, again, don’t give up. We’re also getting close to the last article of the most “boring” part of this series so we will get into more fun stuff soon.
Stay tuned!
Credits
I'd like to thank Joe Hudson for all the help and support while writing this article.
How to fly helicopters series
Check out the other articles on this series. Click here to see all the available material we have.






